![[old] How to upload Marlin firmware from Windows](https://d3t0tbmlie281e.cloudfront.net/igi/mcr/jC2cHqEBXMNhjo6h.medium)
Introduction
As of 2021 Makelangelo-firmware is now built and uploaded with PlatformIO. These instructions will show you how to build & upload from any windows-based device running VSCode.
-
-
-
-
Install Github Desktop (or your favorite flavor of git)
-
Clone the Marlin firmware repository. I will clone to local directory ~/Marlin/
-
Click on the PlatformIO plugin
-
Click Quick Access PIO Home > Open
-
Click Open Project and then
-
Open your copy of folder ~/Marlin/
-
-
-
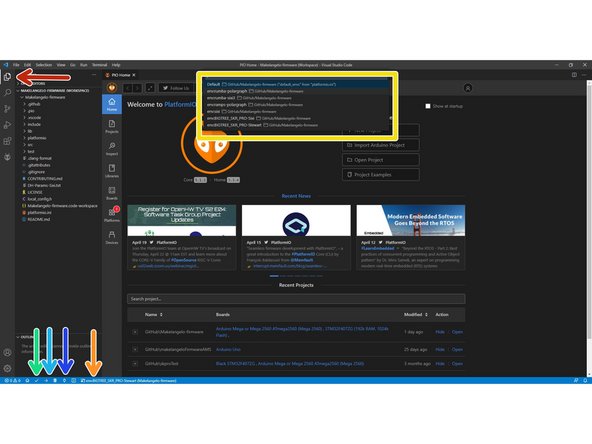
The code from Github has several "branches". Each branch is pre-made for a different type of machine.
-
Click here to change the current branch.
-
bugfix-2.1.x-polargraph-with-config is the branch installed by default on all Makleangelo 5 robots.
-
bugfix-2.1.x-polargraph-huge is the custom version for Huge machines. Out of the box a Huge might still have the 5 branch installed.
-
-
-
Click on "Explorer"
-
Click on "Switch PlatformIO Environment"
-
Choose your environment. The default env for Makelangelo robots is env:mega2560.
-
Compile your code to make sure there are no errors.
-
If your board allows and is connected, upload your code.
-
If your board communicates over serial USB, connect here.
-
-
-
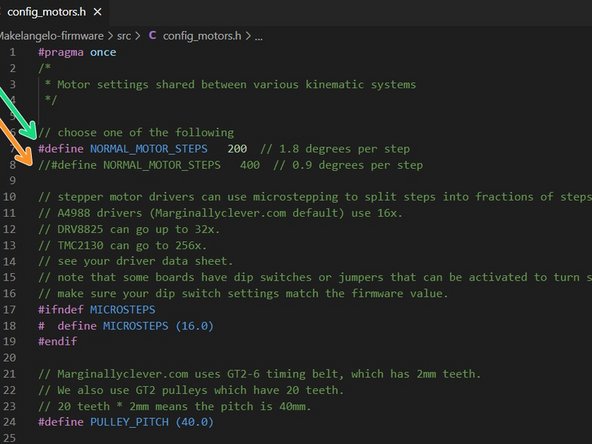
By default the firmware is setup for Makelangelo 5 polargraph robots.
-
Please use Friday Facts 4 to customize your firmware for other hardware, etc.
-
Once this is set correctly, upload the firmware again.
-
-
-
Makelangelo robots store some important numbers in EEPROM such as machine size. New machines have all values at zero. Old machines getting a firmware upgrade may have outdated numbers.
-
To set these numbers to factory default values, connect to your robot through the serial monitor and send M502, factory reset.
-
You can verify the new numbers with M503, report all settings.
-
-
-
Some custom boards (such as STM32* type) must be updated by copying firmware to an SD card. If you're reading this, come to Discord and tell me to finish this section.
-