
Introduction
Recording a robot arm while you move it live is a great way to "rough out" a motion for later refinement. In this guide you'll learn how to prepare, run, and stop live recordings. You'll also learn how to play them back.
Video Overview
-
-
Get your favorite robot arm file. Here is an AR4 is used as an example.
-
Extract the ZIP file. Inside it will be an AR4-3.RO file. Open the file in Robot Overlord.
-
Open the Editor tab: Click Windows > Editor, and drag the tab to arrange it where you want.
-
Tell the Editor which robot you're using: either....
-
...click the Editor "..." button and select MarlinRobotArm OR
-
...drag MarlinRobotArm from the Scene tab onto the "..." button.
-
Now you're ready to start recording.
-
-
-
Select the Limb Node. In this case it is called AR4.
-
Move each joint: turn the dials by either clicking and dragging (large moves) or rolling the middle mouse button (fine moves). This is Forward Kinematics.
-
Do this while recording is on and gcode will be added to the editor window every time the interval elapses.
-
-
-
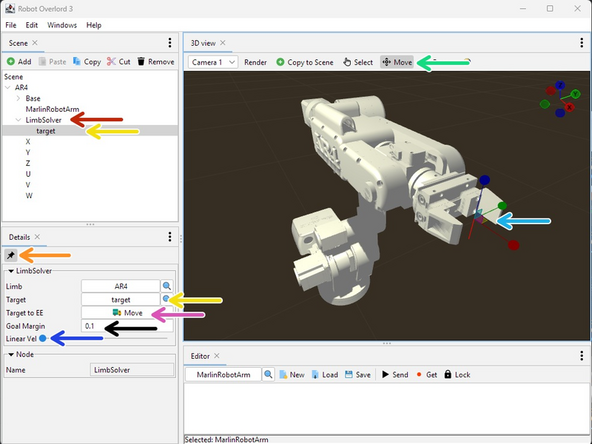
Select the LimbSolver
-
Pin it, if you like.
-
Select the target (two different ways)
-
Toggle Move mode
-
Push and pull the gizmo.
-
Raise the maximum linear velocity. The arm will start moving towards the target. You can move the target in real time like a rubber band.
-
The Target To EE button will move the target to the End Effector, instantly stopping the arm.
-
The Goal Margin button controls how close the arm wants to get to the target. It is a sum of linear distance and rotation degrees.
-
-
-
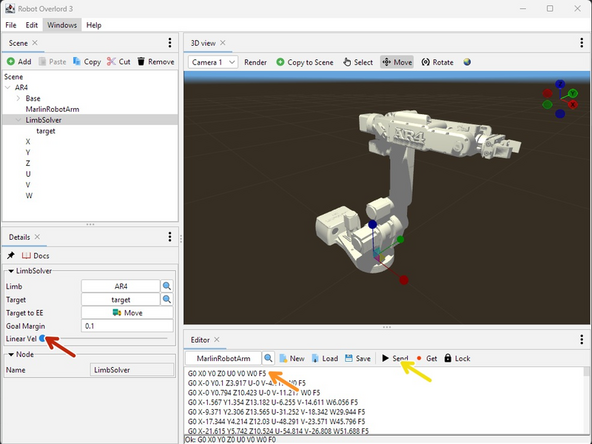
I have created a short recording in the Editor tab using the previous steps.
-
Make sure to stop the recording and turn off the Get + Lock
-
Set the LimbSolver > Linear Velocity to zero or the arm will keep trying to follow the target after every step of the recording.
-
Select the first line in the recording and press Send. Notice the arm jumps to the Forward Kinematic values in the gcode. Notice the caret moves to the next line.
-
Press Send until you are satisfied you have walked through the entire recording.
-
Edit and remix to taste. Bon appetit!
-

Now you can record and play back simple recordings of your robot arm. Huzzah!
Now you can record and play back simple recordings of your robot arm. Huzzah!
